Typ XXI Das Modell Teil 2
Das Innenleben
Inzwischen hat das Modell seine ersten Runden im Wasser erfolgreich beendet. Die Ruderanlenkung im Heck für das Seitenruder habe ich schnell geändert.
Die erste Ausführung über einen Bowdenzug hatte zu viel Spiel. Im frei durchfluteten Heck ist jetzt eine kleine Box für das Servo eingebaut. Die Abdichtung für den Hebel erfolgt radial über einen kleinen O-Ring. Für die Stromversorgung habe ich eine Rundsteckverbindung mit einen Siliconschlauch als Dichtung gemacht. Die Servo-Bewegung wurde durch zwei gebogene Messingstangen übertragen. Auch nicht zufriedenstellend. An Stelle des Gestänges erfolgt die Anlenkung jetzt über zwei Rollen und einen Draht. Der Draht ist ein Stahl-Vorfach mit Kunststoffbeschichtung aus den Angelladen. Diese dritte Variante arbeitet gut.
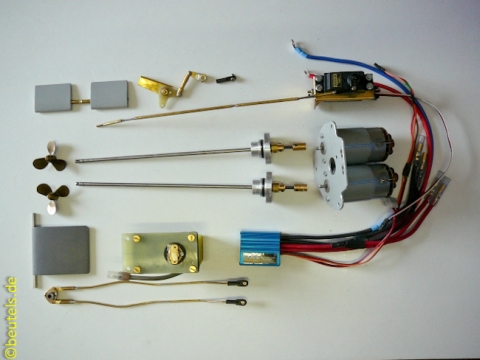
Motor und Ruderteile
Bugteil
Das Technikgerüst des Bugteils besteht aus drei 8 mm PVC Platten, die mit M4 Gewindestangen verbunden sind. Das Gerüst ist am laminierten Verschlussring des Vorderteils angeschraubt. An dem hinteren Spant sind die beweglichen Teile der Verbindungsmechanik angebracht. Zwei M8 Gewindespindeln werden an einem Ende auf 6 mm abgedrehten. Darauf wird je ein Zahnrad (22 Zähne Modul1) mit einer Madenschraube befestigt. Diese Gewindespindeln werden in je einem Kugellager, dass in die Platte eingepresst ist, drehbar befestigt. In der Plattenmitte befindet sich ein großes Zahnrad (70 Zähne) das beide Gewindespindeln verbindet. Das große Zahnrad wird von einem weiteren Zahnrad (15 Zähne) bewegt und dreht beide Gewindespindeln in die Selbe Richtung. Als Antrieb dient ein Getriebemotor mit 60 Umdrehungen je Minute. Die Stromversorgung erfolgt über zwei Messingkontakte von außen. Mit entsprechenden Gegenstücken im Heckteil wird das Modell so zusammen geschraubt. In das große Zahnrad sind einige Löcher gebohrt. Im Notfall kann darüber das Boot, nach dem das Oberdeck und das Turmdruckrohr abgebaut sind, auch mit einem Werkzeug von außen geöffnet werden.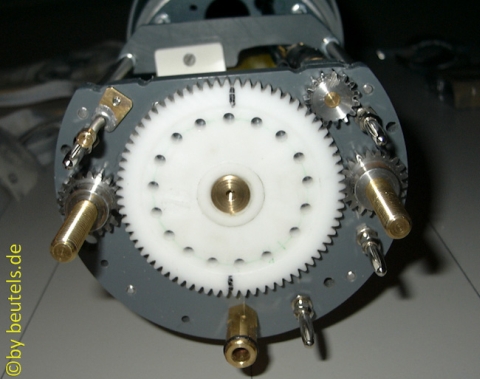
Auf dieser Platte sind noch weitere Bauteile untergebracht. Vier Steckerstifte für die Verbindung der Akkus im Heckteil. Eine mehrpolige Steckverbindung für die Versorgung der Servos und der Beleuchtung. Und eine Steckverbindung für den Wasseranschluss des vorderen Kolbentanks.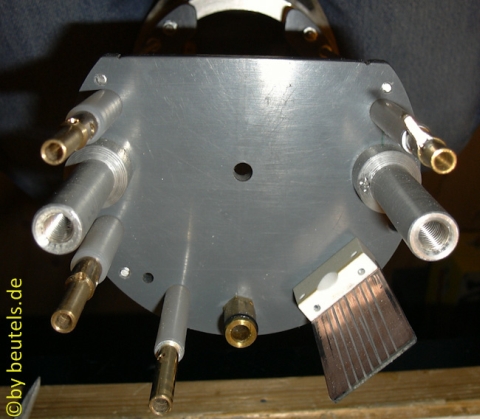
Von der Platte aus nach vorne befinden sich im unteren Teil vier Zellen NiCd 7000 mAh. Darüber ist Platz für den Empfänger und die 5V Spannungsversorgung. Für die Ausfahrgeräte ist ein Mehrkanalschalter eingeplant. Weiter nach vorne sind eine fünfte Akkuzelle und der Getriebemotor für das Zusammenschrauben des Modells eingebaut. Dazwischen sitzt die Kolbentanksteuerung für den vorderen Tauchtank. Der Tank selbst verschwindet komplett im Bugteil, hat einen Durchmesser von 80 mm und einen Inhalt von 700 ml. Alurohr aus einer Tonerkartusche, Kolben mit zwei O-Ringen, Messinggewindespindel M8. Ein Eigenbau. Das Metallgetriebe sorgt für eine akustische Kontrolle beim Betrieb. Vor dem Tank ist noch Platz für die beiden Servos und die Mechanik für die vorderen ausklappbaren Tiefenruder. Die ersten Teile sind bereits fertig.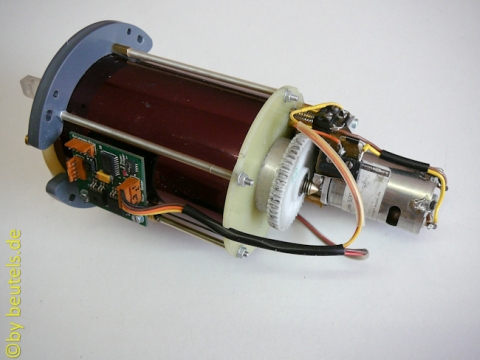
Heckteil
Auch das Heckgerüst besteht aus Spanten und Gewindestangen. Am vordersten Spant befinden sich hier die Gegenstücke für die Verbindungsmechanik, die Akkuverbindungen, die Beleuchtung und die Servo-Stromversorgung. Auch hier ist eine Steckverbindung für den Wasseranschluss des hinteren Kolbentanks. Foto Zwischen den Spanten des Gerüstes sind fünf weitere Akkuzellen eingebaut. Über den Akkus ist der Lage-Tiefenregler eingebaut. Dahinter befindet sich der Kolbentank mit einem Volumen von 500 ml. Sonst baugleich mit dem vorderen Tank. An dem Tank ist auch die Steuerung dafür angebaut. 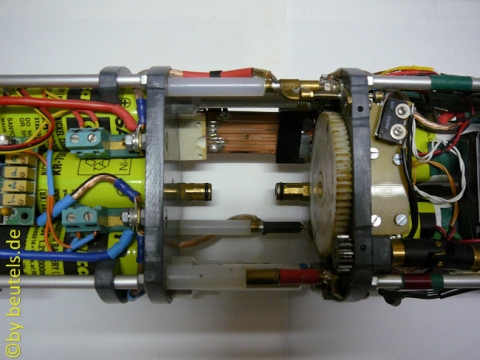
Bug und Heck verschraubt
Da das Heck es Bootes sehr schlank ist, sind die beiden Tanks mit den unterschiedlichen Volumen möglich. Vielleicht wäre es besser gewesen, zwei gleiche Tanks zu nehmen und den Platz für Akkus mit dem Tank zu vertauschen. Da habe ich bei der Planung zu wenig auf die unterschiedliche Volumenform des Bootes geachtet. Aber so funktioniert es auch ganz gut und die Gewindespindel des Kolbentanks hat Platz über den Antriebsmotoren. Seit dem ich eine MC 19 mit Mischer besitze, werden die Tanks über je einen Kippschalter (85%) und einen Schiebepoti (15%) gesteuert. Funktioniert prima.
Werden Bug- und Heckteil zusammen geschraubt, bleiben zwischen den beiden ersten Spanten jedes Teils ca. 7 cm Platz. In diesem Zwischenraum passt das Turmdruckrohr in das später die Ausfahrgeräte eingebaut werden. In diesem Bereich ist auch ein Verteilerstück aus Messing eingebaut. Das ist unten am Abflussrohr des Mittelteils angeschraubt und verbindet die beiden Wasseranschlüsse der Kolbentanks. Über eine Öffnung nach oben wird das Turmdruckrohr gefüllt. Die Ausfahrgeräte werden später komplett im Wasser sein. Mal sehen was ich in Zukunft dort unterbringen kann. Vielleicht gelingt es mir, auch die Geschütze drehbar zu machen.
Das Modell ist im Maßstab 1:50 gut zu handhaben. Ca. 13 kg sind Rücken schonend und lassen sich gut alleine bewältigen. Die Tauchzeit beträgt 13 Sekunden. Zu langsam für den Maßstab, aber schneller geht es mit Kolbentanks kaum. Die Fahrgeschwindigkeit entspricht etwa dem Original. Etwas mehr würde noch ein wenig mehr Spaß machen. Die Fahrtzeit mit den Akkus beträgt etwa 2 ½ Stunden. Der Wendekreis ist über Wasser recht groß. Aber auch das Original brauchte 400 m. Getaucht ist das Modell aber wendiger als ich erwartet hatte. Besonders bei höheren Geschwindigkeiten.
Die Realisierung der vorderen Tiefenruder, Ausfahrgeräte mit einem neuen Turm und mehr Detaillierung werden mich noch eine Weile mit dem Modell beschäftigen.
An dem ganzen Projekt zeigt sich, dass eine möglichst genaue Planung mit Zeichnungen und Berechnungen immer sinnvoll ist. Nachträgliche Änderungen und Umbauten werden vermieden oder vermindert. Auch zu große Pausen in den einzelnen Bauphasen sind nicht hilfreich.
Hier noch ein paar Fahrbilder