Projekt Tommy
von Christian Feldmann und Hans-Jürgen Beutner
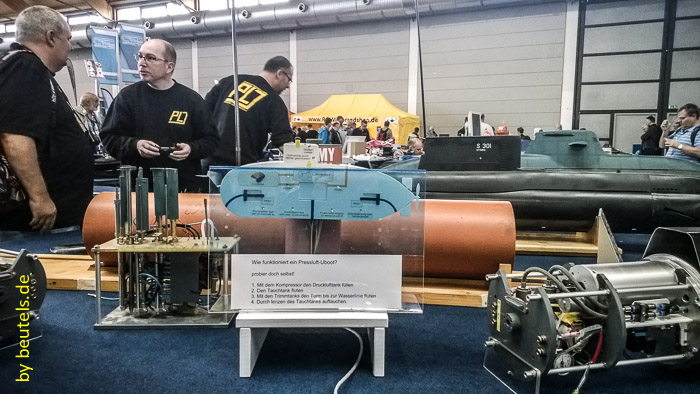
Zur Messe in Karlsruhe hatte Christian etwas Neues mitgebracht. Ein Demo-Modell um die Funktion seiner Lageregelung zu zeigen. Ohne große Erklärung. Ein Steuerknüppel und einen Schalter. Im Gegensatz zu Schildern auf anderen Ständen (bitte nicht anfassen, nur mit den Augen schauen usw.) hatte Christian geschrieben: Bitte spiel mit mir.
Genau das wurde dann auch gemacht. Vier Messetage lang stand das Teil kaum still. Groß und Klein versuchte sich als Kapitän am Steuer. Viele schöne Gespräche wurden durch das Modell angeregt.
Abends beim Essen wurden tolle Ideen entwickelt um die Funktion eines Pressluftbootes besser zeigen und erklären zu können. Die ersten Skizzen entstanden auf ein paar Schmierzetteln. Mehr passierte danach aber nicht.
Bei der Messe in Friedrichshafen stand das Ding wieder auf dem Tisch. Über die Verkabelung auf der Rückseite war eine Verkleidung gebaut. Ein Schild forderte die Kapitäne auf, das Modell bis zu einer weißen Linie zu steuern und die „Tiefe“ zu halten. Mal mit, mal ohne „Automatik“. Wieder gab es Gedränge um das Teil.
Auf der Rückfahrt von der Messe in Friedrichshafen war es Christian langweilig und er griff die Idee mit dem Demo-Modell für Pressluftboote wieder auf.
Christian: Nachdem ich allen diesen Floh ins Ohr gesetzt hatte, musste ich das Thema näher unter die Lupe nehmen.

 Ein Zwischenstopp in einem amerikanischen Burger-Schnellrestaurant brachte brachte einen neuen Skizzenzettel mit der Überschrift: „Das ist Tommy.“. Kurzerhand bekam das Projekt den Codenamen „Tommy“. Auf der restlichen Heimfahrt entstand auf diesem Zettel eine detaillierte Skizze von Tommy.
Ein Zwischenstopp in einem amerikanischen Burger-Schnellrestaurant brachte brachte einen neuen Skizzenzettel mit der Überschrift: „Das ist Tommy.“. Kurzerhand bekam das Projekt den Codenamen „Tommy“. Auf der restlichen Heimfahrt entstand auf diesem Zettel eine detaillierte Skizze von Tommy.
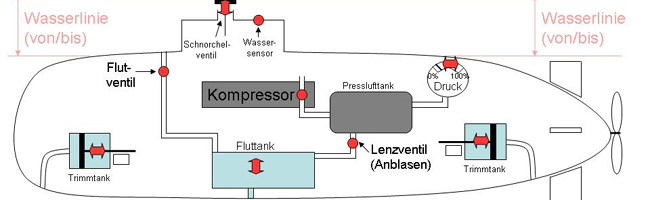
Mich interessiert in erster Linie die elektronische Seite von dem Projekt. Anhand der Skizze habe ich die benötigten Funktionen ermittelt:
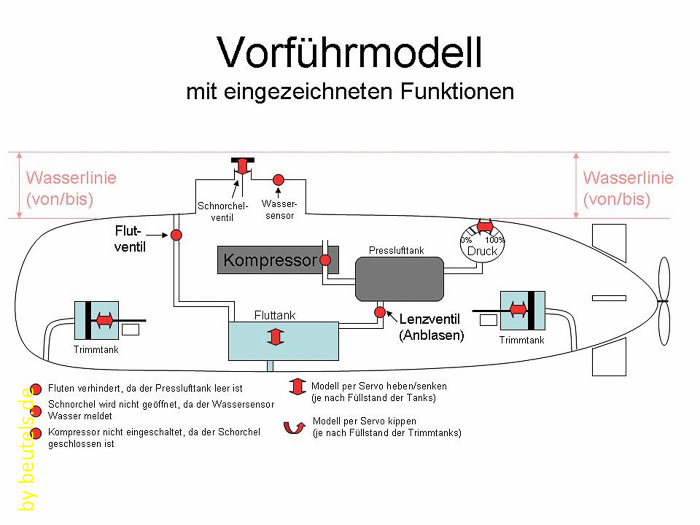
Es sollten 4 LEDs und 7 Servos gesteuert werden. Zur Steuerung werden 4 Schalter und 2 Potis benötigt. Später kamen noch 5 weitere LEDs für Statusausgaben und ein weiterer Schalter dazu. Damit sind letztendlich 21 unterschiedliche Funktionen zu verarbeiten, zwei davon mir ADW (Analo-Digital-Wandler).
Dafür muss ein relativ großer Mikrocontroller genommen werden. Davon befinden sich natürlich nicht viele in der Grabbelkiste. Ein Controller mit 28 Beinchen war aber dabei, also ran an den Speck. Es muss die Firmware erstellt werden und eine Platine entworfen werden.
Die Platine ist kein Problem. Die kann ich mir so erstellen, wie ich sie brauche. Eine Ätzanlage ist vorhanden.
Die Firmware soll eine Menge Funktionen enthalten. Das bedeutet eine Menge Arbeit, aber Probleme habe ich nicht erwartet. Na ja, wie man sich irren kann.
Die erste Version der Firmware war schnell erstellt und hat nur ein paar Testfunktionen enthalten. Dann kam die Katastrophe, der Compiler wollte mit diesem Controller nichts zu tun haben.
Ich musste mich tagelang mit den Details vom Compiler vertraut machen, bis ich den Mikrocontroller integrieren konnte. Aber diese Arbeit muss man ja nur ein mal machen.
Endlich ging es wirklich los. Die Testplatine wurde geätzt und bestückt. Dann den Controller einsetzen und mit einem Programmier-Stecker versehen.
So viele Funktionen miteinander in Beziehung zu bringen war eine Menge Arbeit. Da die Hardware noch nicht fertig war, habe ich alle Beziehungen nach Augenmaß umgesetzt. Dabei habe ich die meisten Werte so voreingestellt, dass ich sie nachträglich schnell ändern konnte.
Dann kam der Zufall zur Hilfe. Der Stefan rief an und brauchte Hilfe. Er hatte einen alten Sender gekauft der Rauchzeichen gab. Weil er den Sender jetzt nicht mehr gebrauchen konnte, hat er ihn mir kurzerhand zugeschickt.
Der Sender hat zwei Kreuzknüppel und zwei Drehknöpfe im oberen Bedienfeld. Für die Kreuzknüppel habe ich bei dem Tommy keine Verwendung, aber die Potis wollte ich mit benutzen.
Die komplette Elektronik konnte ich mit einem Seitenschneider einfach entfernen. Dann habe ich ein paar neue Kabel an die Potis und vier neue Schalter in den unteren Bereich vom Sender angebracht.
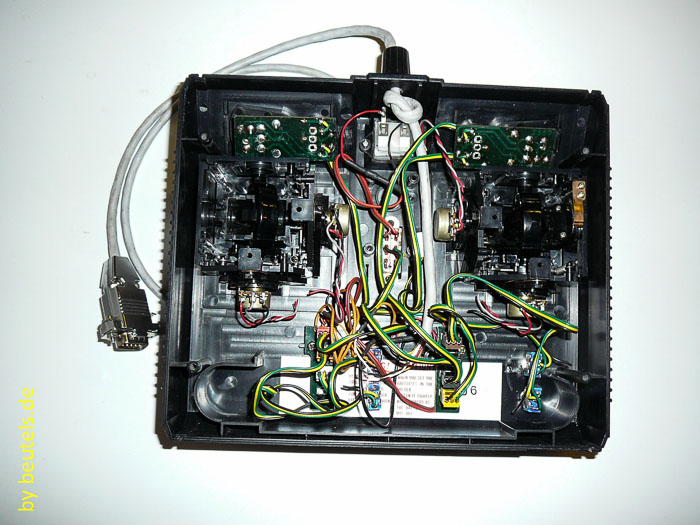
Der Sender
Die Firmware musste jetzt angepasst werden. Ich hatte sie ursprünglich für schöne Potis programmiert, aber in dem Sender waren alte Schätzchen verbaut, die richtig schlechte Werte hatten. Natürlich hatte ich diese Werte nicht so einfach einstellbar gemacht. Nach einigen Versuchen, hatte ich die optimale Einstellung gefunden und war mit dem Ergebnis zufrieden. Alles läuft wie geschmiert, also schnell Hans-Jürgen angerufen: Wo bleibt die Hardware ;-)
Hans-Jürgen lies sich nicht lumpen und kam an einem schönen Wochenende mit dem fertigen Tommy vorbei. Schnell haben wir die Steuerung angeschlossen und uns das Ergebnis angeschaut. Die ersten Anpassungen waren schnell gemacht. Zwei Servos mussten invertiert werden, bei ein paar anderen mussten die Servowege angepasst werden. Solche Anpassungen hatte ich ja erwartet und konnte sie schnell durchführen. Das Ergebnis war vielversprechend.
Damit war ich erst mal glücklich. Hans-Jürgen hat die Steuerung und den Tommy mit genommen, um die letzten Tücken der Hardware zu beseitigen.
Hans-Jürgen: Auf der Rückfahrt war ich etwas enttäuscht. Ich hatte geglaubt, die Elektronischen Anpassungen würden vier Wochen dauern und nicht 20 Minuten.
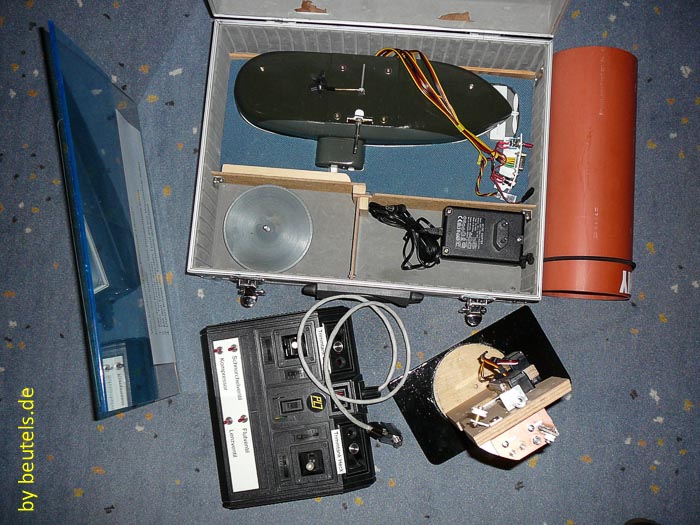
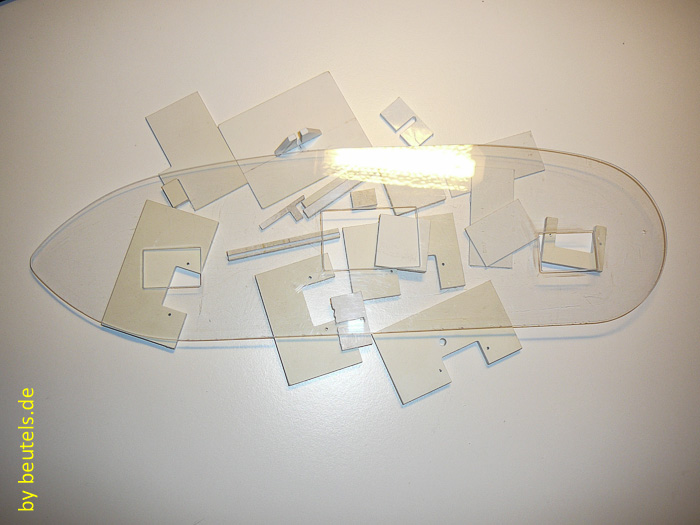
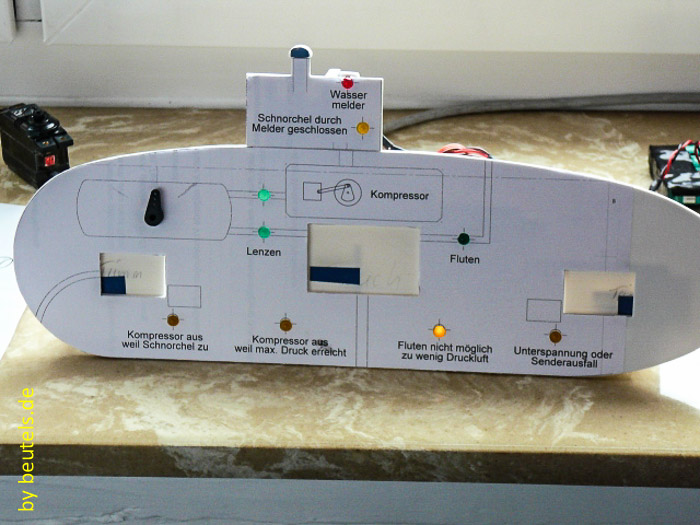
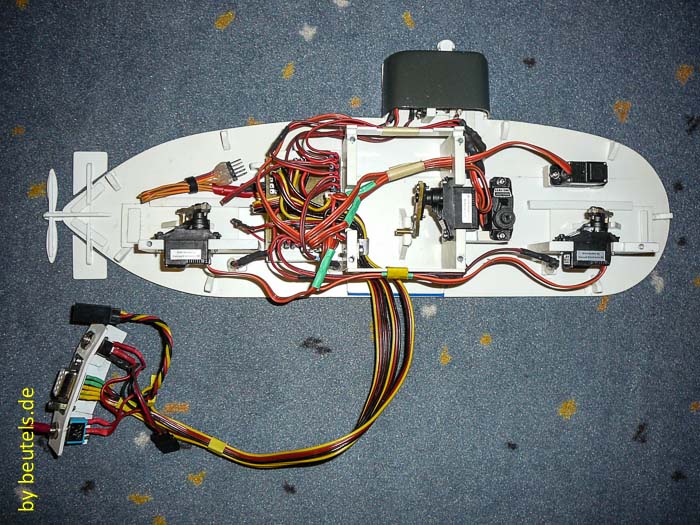
Selber hatte ich schon einige Stunden mit der Hardware verbracht. Alle beweglichen Teile waren aus Polystyrol gefertigt und an der Frontplatte in U-Boot Form angebracht. Alles musste schön leichtgängig sein, denn die kleinen Servos haben nicht viel Kraft und die Hebelwege sind lang.
Einige Leuchtdioden und verständliche Beschriftung mussten auch irgendwo Platz finden.
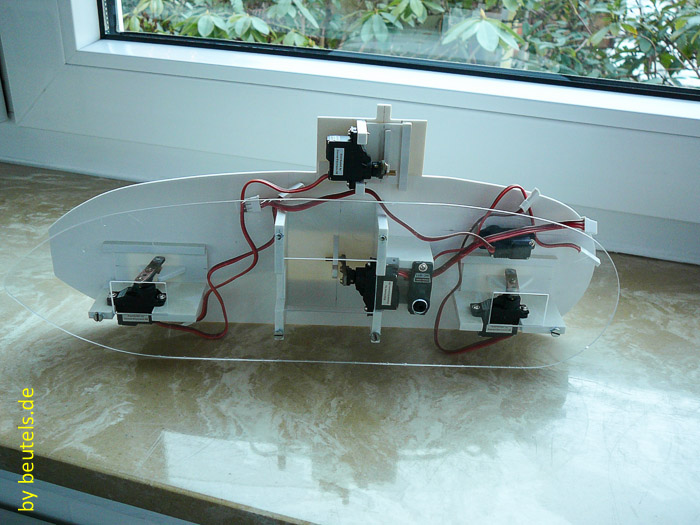
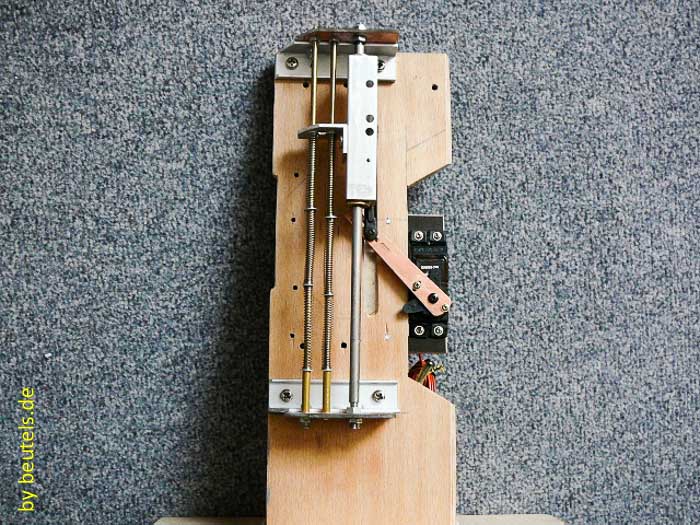
Als größte Herausforderung erwies sich der Hubmechanismus der die Tauchfunktion simulieren sollte. Erst die dritte Variante lieferte das gewünschte Ergebnis. Immerhin sollten ca. 280g sauber ca. 7cm gehoben oder gesenkt werden.
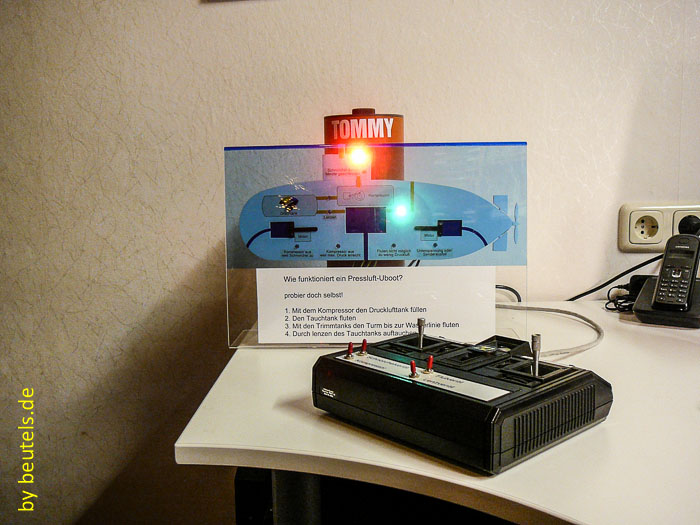
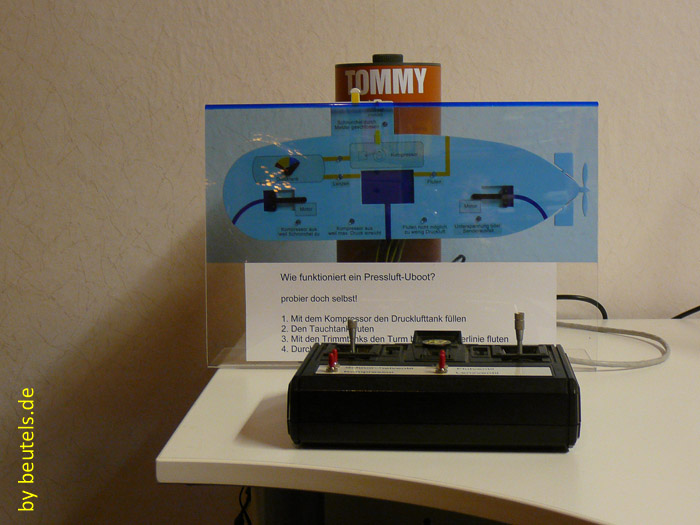
Bei zwei Treffen machte Christian noch kleine Softwareanpassungen und ich konnte weiter basteln. Schließlich sollte auch die Rückseite ein wenig wie ein U-Boot aussehen. Dafür wurde eine dünne GfK Abdeckung laminiert. Das brachte aber noch einmal 70g und Hubvariante vier entstand. Auch der Ständer mit dem Hubmechanismus musste verkleidet werden. Ein Stück rotes Abflussrohr erschien mir passend. Letzter Schritt war die Darstellung des Wassers. Eine Plexiglas-Platte und blaue Folie passten. Alles wurde ein wenig beschriftet und einen ordentlichen Koffer verpackt. Fertig.
Wir sind sehr gespannt, wie das Modell beim Publikum auf der nächsten Messe ankommt.
Ein erster Test bei einer kleinen Modellbau-Veranstaltung war positiv. Erster Einsatz soll eine kleinere Messe in Bad Salzuflen im. Januar sein.